Hii All,
I have some problem to sending data ubidots with ethernet shield, because added 5 motor servo.
before that, i have try to send data without motor servo and all look good. But when i try add 5 motor servo. Data temperatur & pH sensor cant sent to ubidots.
Here my schematic without pH Meter to Analog 0
https://raw.githubusercontent.com/qalit/eUngkot/master/SKEMA%20RANGKAIAN/Rangkaian%20Prototipe.png
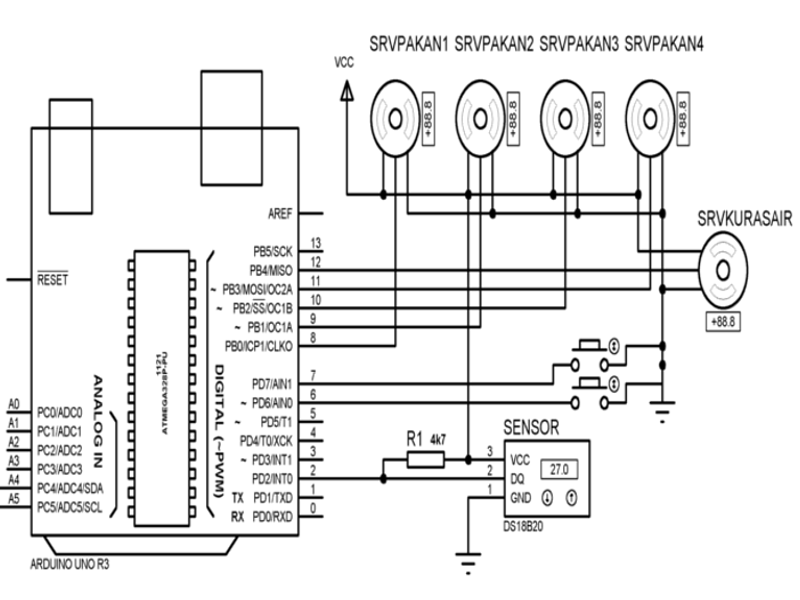{kind=link}
Code Before added Servo :
#include <SPI.h> #include <Ethernet.h> #include <UbidotsEthernet.h> #include <OneWire.h> #include <DallasTemperature.h> byte mac[] = { 0xDE, 0xAD, 0xBE, 0xEF, 0xFE, 0xED }; // Set the static IP address to use if the DHCP fails to assign IPAddress ip(192, 168, 0, 177);
unsigned long interval=1000; // the time we need to wait unsigned long interval1=60000; unsigned long previousMillis=0; // millis() returns an unsigned long.
#define ONE_WIRE_BUS 2 #define PHSensorPin 0 //pH meter Analog output to Arduino Analog Input 0 unsigned long int avgValue; //Store the average value of the sensor feedback float b; int buf[10],temp; OneWire oneWire(ONE_WIRE_BUS); DallasTemperature sensorSuhu(&oneWire); float suhuSekarang;
#define IDSuhu "5829c80d76254214e3f9d3a1" #define IDpH "58a9dd0b762542238e7cf8ae" #define TOKEN "iGPgAzahoarBndo3RvDDUfln0z1aDK"
Ubidots client(TOKEN);
void setup(){ if (Ethernet.begin(mac) == 0) { //Serial.println("Failed to configure Ethernet using DHCP"); // try to congifure using IP address instead of DHCP: Ethernet.begin(mac, ip); } unsigned long currentMillis = millis(); if ((unsigned long)(currentMillis - previousMillis) >= interval+4000) { delay(5000); previousMillis = millis(); }
}
void loop() { unsigned long currentMillis = millis(); for(int i=0;i<10;i++){ buf[i]=analogRead(PHSensorPin); if ((unsigned long)(currentMillis - previousMillis) >= interval) { delay(10); } } for(int i=0;i<9;i++){ for(int j=i+1;j<10;j++){ if(buf[i]>buf[j]){ temp=buf[i]; buf[i]=buf[j]; buf[j]=temp; } } } avgValue=0; for(int i=2;i<8;i++) //take the average value of 6 center sample avgValue+=buf[i]; float phValue=(float)avgValue*5.0/1024/6; //convert the analog into millivolt phValue=3.5*phValue; sensorSuhu.requestTemperatures(); float suhu = sensorSuhu.getTempCByIndex(0);
if ((unsigned long)(currentMillis - previousMillis) >= interval1) { client.add(IDSuhu, suhu); client.add(IDpH, phValue); previousMillis = millis(); client.sendAll(); delay(60000);
} }
And Here is code with Servo motor implemented :
#include <SPI.h> #include <Ethernet.h> #include <UbidotsEthernet.h> #include <RTClib.h> #include <Servo.h> #include <OneWire.h> #include <DallasTemperature.h> byte mac[] = { 0xDE, 0xAD, 0xBE, 0xEF, 0xFE, 0xED }; // Set the static IP address to use if the DHCP fails to assign IPAddress ip(192, 168, 0, 177);
unsigned long interval=1000; // the time we need to wait unsigned long interval1=60000; unsigned long previousMillis=0; // millis() returns an unsigned long.
#define ONE_WIRE_BUS 2 #define PHSensorPin 0 //pH meter Analog output to Arduino Analog Input 0 unsigned long int avgValue; //Store the average value of the sensor feedback float b; int buf[10],temp; OneWire oneWire(ONE_WIRE_BUS); DallasTemperature sensorSuhu(&oneWire); float suhuSekarang; RTC_DS3231 rtc; char daysOfTheWeek[7][12] = {"Min", "Sen", "Sel", "Rab", "Kam", "Jum", "Sab"};
int WLvlAtas = 6; int WLvlBawah = 7; int servoPin1 = 8; int servoPin2 = 9; int servoPin3 = 3; int servoPin4 = 5; int srvPinKuras = 12; Servo myservo1; // servo pakan 1 Servo myservo2; // servo pakan 2 Servo myservo3; // servo pakan 3 Servo myservo4; // servo pakan 4 Servo srvKurasAir; // servo kuras air
int servoAngle = 0;
#define IDSuhu "5829c80d76254214e3f9d3a1" #define IDpH "58a9dd0b762542238e7cf8ae" #define IDPakan "5829c8a476254218b9f109e7" #define TOKEN "iGPgAzahoarBndo3RvDDUfln0z1aDK"
Ubidots client(TOKEN);
void setup(){ unsigned long currentMillis = millis(); //Serial.begin(9600); if (Ethernet.begin(mac) == 0) { //Serial.println("Failed to configure Ethernet using DHCP"); // try to congifure using IP address instead of DHCP: Ethernet.begin(mac, ip); } if ((unsigned long)(currentMillis - previousMillis) >= 5000) { delay(5000); } if (! rtc.begin()) { ////Serial.println("RTC Mati"); while (1); } if (rtc.lostPower()) { //rtc.adjust(DateTime(__DATE__,__TIME__)); ////Serial.println("RTC lowbat !!"); } pinMode(WLvlAtas, INPUT_PULLUP); pinMode(WLvlBawah, INPUT_PULLUP);
myservo1.attach(servoPin1); myservo2.attach(servoPin2); myservo3.attach(servoPin3); myservo4.attach(servoPin4); srvKurasAir.attach(srvPinKuras); delay(1000); myservo1.write(2); myservo2.write(2); myservo3.write(2); myservo4.write(2); srvKurasAir.write(2); delay(2000); srvKurasAir.detach(); }
void loop() { unsigned long currentMillis = millis(); // if ((unsigned long)(currentMillis - previousMillis) >= interval) { // delay(5000); // } delay(1000); for(int i=0;i<10;i++){ buf[i]=analogRead(PHSensorPin); if ((unsigned long)(currentMillis - previousMillis) >= interval) { delay(10); } } for(int i=0;i<9;i++){ for(int j=i+1;j<10;j++){ if(buf[i]>buf[j]){ temp=buf[i]; buf[i]=buf[j]; buf[j]=temp; } } } avgValue=0; for(int i=2;i<8;i++) //take the average value of 6 center sample avgValue+=buf[i]; float phValue=(float)avgValue*5.0/1024/6; //convert the analog into millivolt phValue=3.5*phValue; sensorSuhu.requestTemperatures(); float suhu = sensorSuhu.getTempCByIndex(0); if ((unsigned long)(currentMillis - previousMillis) >= interval1) { client.add(IDSuhu, suhu); client.add(IDpH, phValue); previousMillis = millis(); client.sendAll(); delay(60000);
} }
And servo wont stop from buzz/noise
Any idea?
{kind=link}